

Research objectives
Improving transparency in human-machine interaction systems when no force sensors are available for both the human and the machine.
In most cases, position-error based control with fixed proportional-derivative (PD) controllers provides poor transparency. Most previous studies considered gain switching as switching high or low gains to the slave manipulator. Its rules are based on a boundary value from estimated impedance changes between the free motion and the hard contact situation. The issue is to have the knowledge of the boundary value based on the experimental results. Furthermore, these results are not consistent due tothe hardware mechanics. To resolve this issue, we adopt Bayesian online changepoint detection to detect the abrupt slave environment change. The Bayesian online changepoint detection has the ability to discriminate both free motion and hard contact.

Bilateral Teleoperation
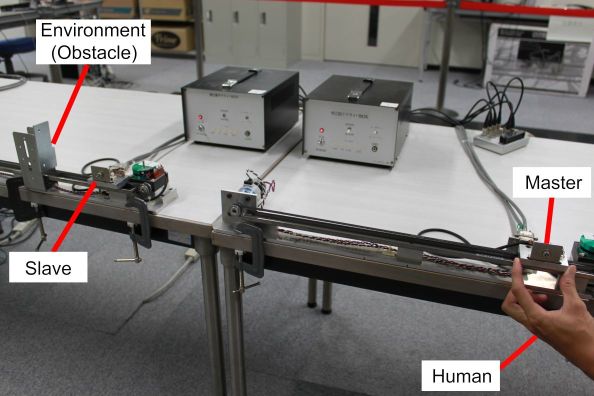
Teleoperation system which consists of a human, a master manipulator, a slave manipulator, a communication channel and any environment which controls the transfer of force and velocity information in representing HMI systems since it is part of the HMI field. A human operator controls the master manipulator while the environment is manipulated by the slave device.
Position-error based control
The position-error based control between the desired and actual machine positions is usually proportional to the contact force. This control structure is widely used instead of position-force feedback because position sensing is much easier and less expensive to implement than direct force structure Obviously, the position tracking between the master and the slave is not performing well which illustrates the position-error based controller is providing poor transparency between the human and the environment.
Gain switching control
Gain switching method, switching them to be high or low values in response to estimated force changes at the slave environment. As the slave is in free motion, the estimated slave environment force should be below the threshold value. Furthermore, the estimated force should go above the threshold value when the slave is in contact with any obstacles.
As the estimated force reaches above the threshold value, the master’s gain and the slave’s gain are switching high to low and low to high alternately. The human can feel the hard contact by the resonating force transmitted to them instead of such one backward force to the human.
In addition, the slave-environment forces change abruptly in real time, it is difficult to set the precise value of the threshold for these gain switching decisions. Moreover, the threshold value has to be observed and tuned in advance to utilize the gain switching approach.
Bayesian online changepoint detection (BOCPD) based gain switching control
Bayesian online changepoint detection (BOCPD) is the identification of time points at which properties of time-series data change. We apply BOCPD to determine the free motion or the hard contact situation conditions without the use of force sensors instead of a threshold approach used in gain switching approach.
The Bayesian online changepoint detection based gain switching conrol allows us to set the gain switching controllers without knowledge of the threshold values before the gain switching approach is performed.
Publications (本研究に関する発表)
- Hon Fai Lau and Shigeru Yamamoto, “Bayesian Online Changepoint Detection to Improve Transparency in Human-Machine Interaction Systems,” 49th IEEE Conference on Decision and Control (CDC 2010), Atlanta, USA, December 2010.
- Hon Fai Lau and Shigeru Yamamoto, “Network Interpretation of a Human-Machine Interaction System,” the 7th Asian Control Conference, pp. 1491-1496, Hong Kong, August 2009.
References (参考文献)
- P. F. Hokayem and M. W. Spong, “Bilateral teleoperation: An historical survey,” Automatica, Vol. 42, Issue 12, pp. 2035-2057, December 2006.
- D. A. Lawrence, “Stability and transparency in bilateral teleoperation,” IEEE Trans. Robotics and Automation, Vol. 9, pp. 624-637, October 1993.
- B. Hannaford, “A design framework for teleoperators with kinesthetic feedback,” IEEE Transactions on Robotics and Automation, Vol. 5, pp. 426-434, 1989.
- L. Ni and D. W. L. Wang, “A Gain-switching Control Scheme for Position-error-based Force-reflecting Teleoperation,” Haptic Interfaces for Virtual Environment and Teleoperator Systems, pp. 239–246, 2002.
- L. Ni and D. W. L. Wang, “A Gain-Switching Control Scheme for Position-Error-Based Bilateral Teleoperation: Contact Stability Analysis and Controller Design,” The International Journal of Robotics Research, Vol. 23, No. 3, pp. 255-274, March 2004.
- R. P. Adams and D. J. MacKay, “Bayesian online changepoint detection,” Technical Report at University of Cambridge, arXiv:0710.3742v1, [stat.ML], 2007.
